МицроПитхон се широко користи са микроконтролерима и уграђеним системима. Можемо писати код и библиотеке унутар МицроПитхон ИДЕ-а и повезати више сензора. Овај запис ће вас упутити на мерење удаљености помоћу ЕСП32 са ХЦ-СР04 сензором.
ЕСП32 са ХЦ-СР04 ултразвучним сензором који користи МицроПитхон
Повезивање ЕСП32 са ултразвучним само захтева две жице за повезивање. Користећи ултразвучне сензоре, можемо да меримо растојање објекта и можемо да покренемо одговоре на основу овог система, као што су системи за избегавање судара.

Користећи МицроПитхон који је дизајниран језик за ЕСП32 и друге микроконтролере, можемо повезати више сензора као што је ХЦ-СР04 . МицроПитхон код ће бити написан који израчунава време потребно СОНАР таласу да стигне од сензора до објекта и назад до објекта. Касније користећи формулу удаљености можемо израчунати удаљеност објекта.
Ево неких главних карактеристика ХЦ-СР04 сензора:
| Карактеристике | Валуе |
| Радни напон | 5В ДЦ |
| Оператинг Цуррент | 15мА |
| Радна фреквенција | 40КХз |
| Мој домет | 2 цм/ 1 инч |
| Мак Ранге | 400 цм/ 13 стопа |
| Прецизност | 3 мм |
| Меасуринг Англе | <15 степени |
ХЦ-СР04 Пиноут ХЦ-СР04 садржи следеће четири игле:
- Вцц: Повежите се на ЕСП32 Вин пин
- Гнд: Повежите се на ГНД
- Триг: Пин за пријем контролног сигнала са ЕСП32 плоче
- Одјек: Пошаљи повратни сигнал. Плоча микроконтролера прима овај сигнал за израчунавање удаљености користећи време

Како ради ултразвук
Након што је сензор ХЦ-СР04 повезан са ЕСП32 сигнал на Триг пин ће бити генерисан од стране плоче. Када се сигнал прими на триг пин сензора ХЦ-СР04, генерише се ултразвучни талас који напушта сензор и удара у објекат или тело препреке. Након ударца ће се вратити на површину објекта.
Када се рефлектовани талас врати до пријемног краја сензора, генерише се сигнални импулс на ехо пину. ЕСП32 прима ехо пин сигнал и помоћу њега израчунава растојање између објекта и сензора Формула удаљености.

Укупно израчунато растојање треба поделити са два унутар ЕСП32 кода јер је првобитно растојање једнако укупној удаљености од сензора до објекта и назад до пријемног краја сензора. Дакле, реална удаљеност је сигнал који је једнак половини те удаљености.
Шематски
Следи шема за повезивање ЕСП32 са ултразвучним сензором:
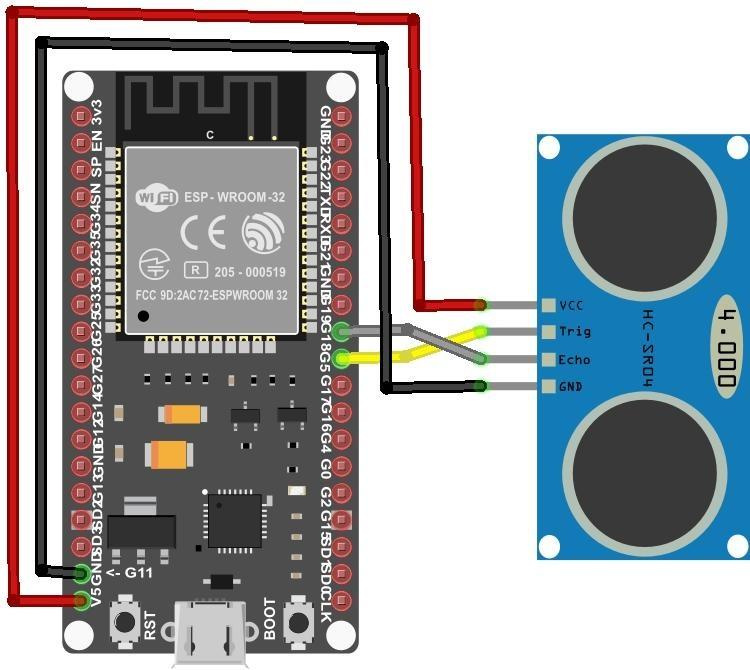
Повежите окидач и ехо пин сензора са ГПИО 5 и ГПИО 18 ЕСП32 респективно. Такође повежите ЕСП32 ГНД и Вин пин са сензорским пиновима.
| ХЦ-СР04 ултразвучни сензор | ЕСП32 Пин |
| Триг | ГПИО 5 |
| Одјек | ГПИО 18 |
| ГНД | ГНД |
| ВЦЦ | ДОЋИ |
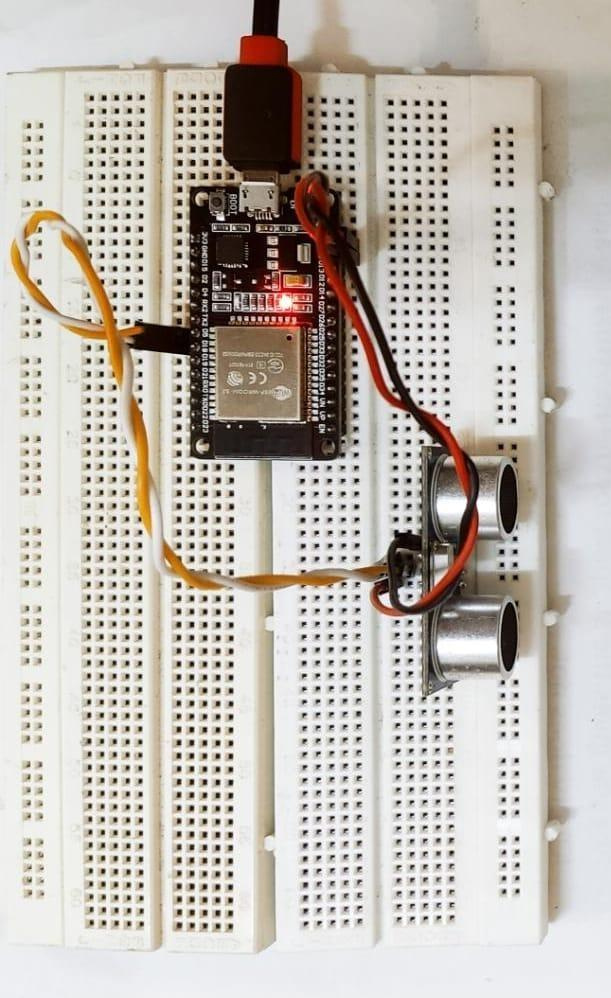
Хардвер
Следеће компоненте су потребне за програмирање ултразвучног сензора:
- ЕСП32
- ХЦ-СР04
- Бреадбоард
- Јумпер Вирес
Како подесити ултразвучни ХЦ-СР04 са ЕСП32 користећи МицроПитхон
Пре него што можемо да програмирамо ЕСП32 са ултразвучним сензором, морамо да инсталирамо библиотеку у њега. Повежите ЕСП32 плочу са рачунаром. Пратите кораке да бисте довршили конфигурацију ЕСП32 са ултразвучним сензором у Тхонни ИДЕ користећи МицроПитхон.
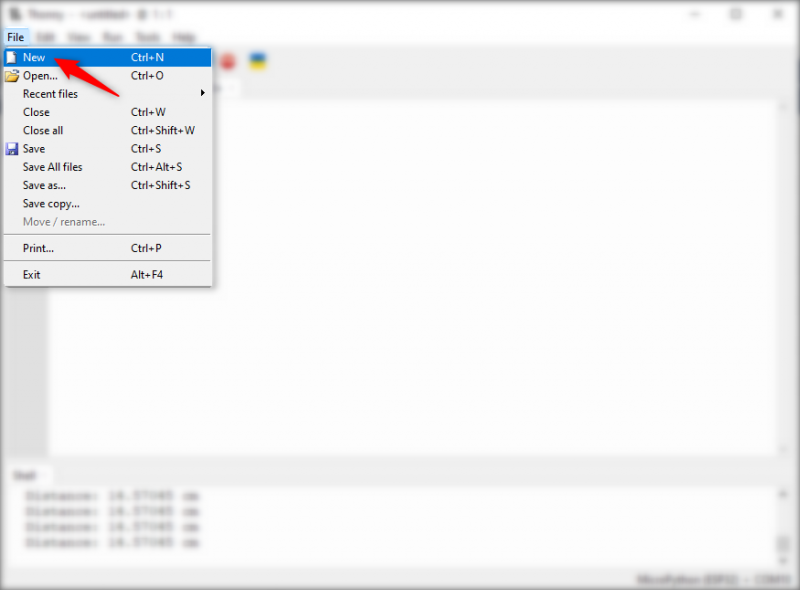
Корак 1: Сада отворите Тхонни ИДЕ. Креирајте нову датотеку у прозору уређивача Иди на : Датотека>Ново или притисните Цтрл + Н .
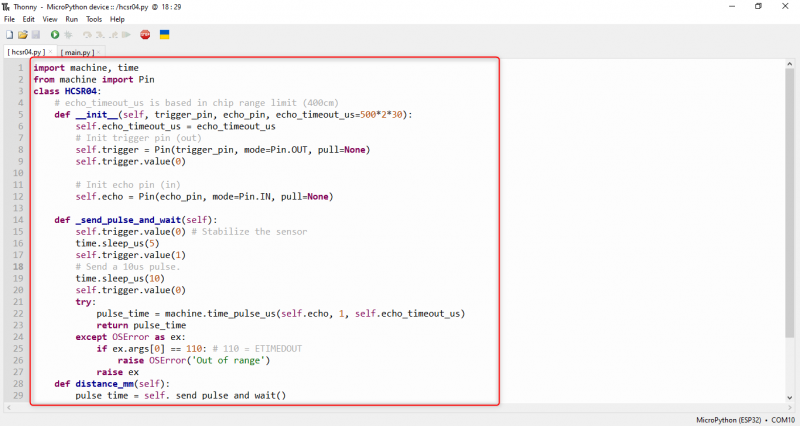
Када се нова датотека отвори, налепите следећи код у прозор Тхонни ИДЕ едитора.
увоз машина , времеиз машина увоз Пин
класа ХЦСР04:
# ецхо_тимеоут_ус се заснива на ограничењу опсега чипа (400 цм)
деф __вруће__ ( селф , триггер_пин , ецхо_пин , ецхо_тимеоут_ус = 500 * два * 30 ) :
селф . ецхо_тимеоут_ус = ецхо_тимеоут_ус
# Инит триггер пин (оут)
селф . Окидач = Пин ( триггер_пин , режим = Пин. ОУТ , повући = Ниједан )
селф . Окидач . вредност ( 0 )
# Инит ецхо пин (ин)
селф . одјек = Пин ( ецхо_пин , режим = Пин. ИН , повући = Ниједан )
деф _сенд_пулсе_анд_ваит ( селф ) :
селф . Окидач . вредност ( 0 ) # Стабилизујте сензор
време . слееп_ус ( 5 )
селф . Окидач . вредност ( 1 )
# Пошаљите 10ус пулс.
време . слееп_ус ( 10 )
селф . Окидач . вредност ( 0 )
покушати :
пулсе_тиме = машина. тиме_пулсе_ус ( селф . одјек , 1 , селф . ецхо_тимеоут_ус )
повратак пулсе_тиме
осим ОСЕррор као нпр:
ако пр. аргс [ 0 ] == 110 : # 110 = ЕТИМЕДОУТ
подићи ОСЕррор ( 'Ван домета' )
подићи пр
деф дистанце_мм ( селф ) :
пулсе_тиме = селф ._сенд_пулсе_анд_ваит ( )
мм = пулсе_тиме * 100 // 582
повратак мм
деф дистанце_цм ( селф ) :
пулсе_тиме = селф ._сенд_пулсе_анд_ваит ( )
цмс = ( пулсе_тиме / два ) / 29.1
повратак цмс
Корак 2: Након писања библиотека код унутар прозора уређивача сада морамо да га сачувамо унутар МицроПитхон уређаја.
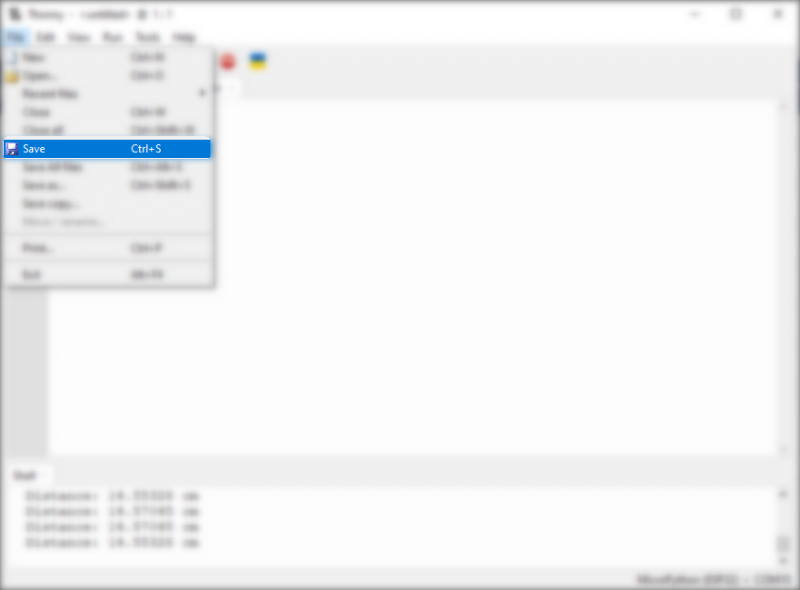
Корак 3: Иди на : Датотека>Сачувај или притисните Цтрл + С .
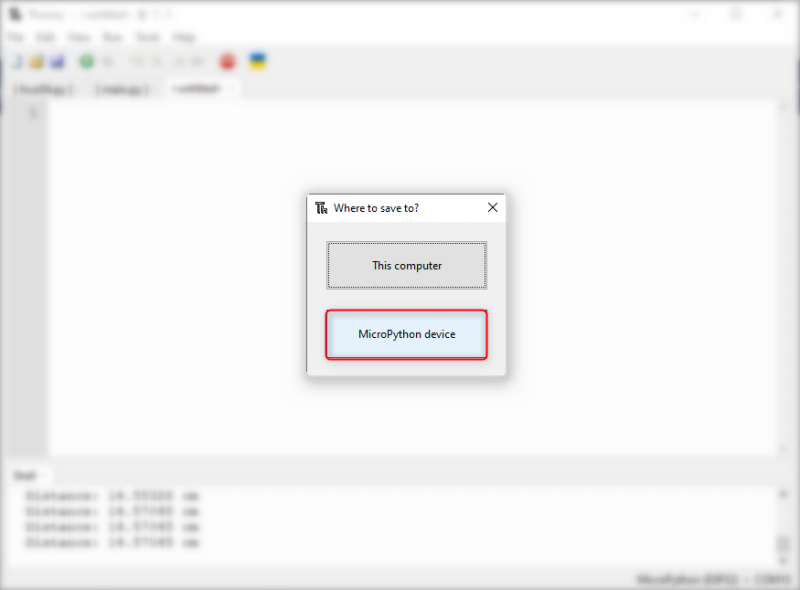
4. корак: Појавиће се нови прозор. Уверите се да је ЕСП32 повезан са рачунаром. Изаберите МицроПитхон уређај да бисте сачували датотеку библиотеке.
5. корак: Сачувајте датотеку ултразвучне библиотеке са именом хцср04.пи и кликните У реду .

Сада је библиотека ултразвучних сензора хцср04 успешно додата на ЕСП32 плочу. Сада можемо позвати библиотечке функције унутар кода за мерење удаљености различитих објеката.
Код за ултразвучни сензор који користи МицроПитхон
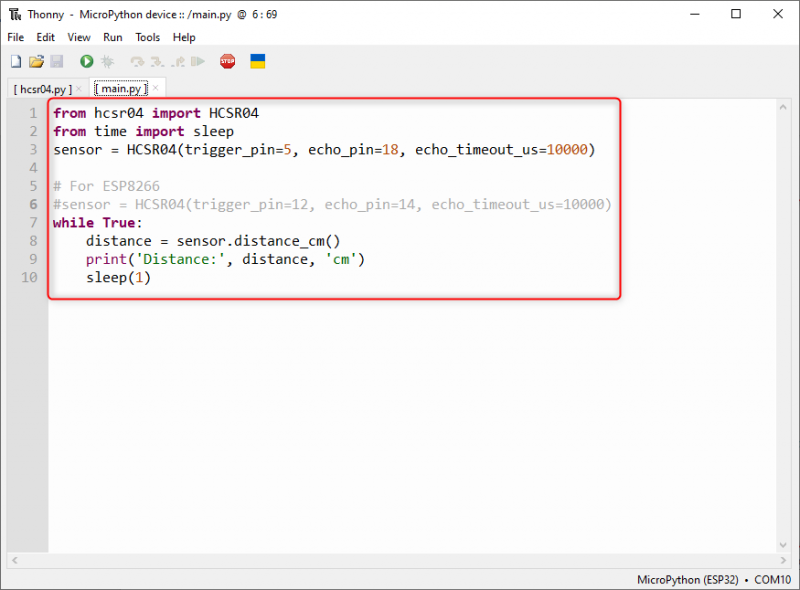
За код ултразвучног сензора креирајте нову датотеку ( Цтрл + Н ). У прозору уређивача унесите код дат испод и сачувајте га у маин.пи или боот.пи фајл. Овај код ће одштампати растојање било ког објекта који дође испред ХЦ-СР04.
Код је започео позивањем важних библиотека као нпр ХЦСР04 и време библиотека заједно са спавати да дају одлагања.
Затим смо креирали нови објекат са именом сензор . Овај објекат узима три различита аргумента: окидач, ехо и временско ограничење. Овде је временско ограничење дефинисано као максимално време након што сензор изађе из опсега.
сензор = ХЦСР04 ( триггер_пин = 5 , ецхо_пин = 18 , ецхо_тимеоут_ус = 10000 )За мерење и чување удаљености нови објекат под називом удаљеност је створен. Овај објекат ће сачувати растојање у цм.
удаљеност = сензор. дистанце_цм ( )Напишите следећи код да бисте добили податке у мм.
удаљеност = сензор. дистанце_мм ( )Затим смо одштампали резултат на МицроПитхон ИДЕ љусци.
принт ( 'Удаљеност:' , удаљеност , 'центиметар' )На крају се даје кашњење од 1 секунде.
спавати ( 1 )Комплетан код је дат у наставку:
из хцср04 увоз ХЦСР04из време увоз спавати
# ЕСП32
сензор = ХЦСР04 ( триггер_пин = 5 , ецхо_пин = 18 , ецхо_тимеоут_ус = 10000 )
# ЕСП8266
#сенсор = ХЦСР04(триггер_пин=12, ецхо_пин=14, ецхо_тимеоут_ус=10000)
док Истинито :
удаљеност = сензор. дистанце_цм ( )
принт ( 'Удаљеност:' , удаљеност , 'центиметар' )
спавати ( 1 )
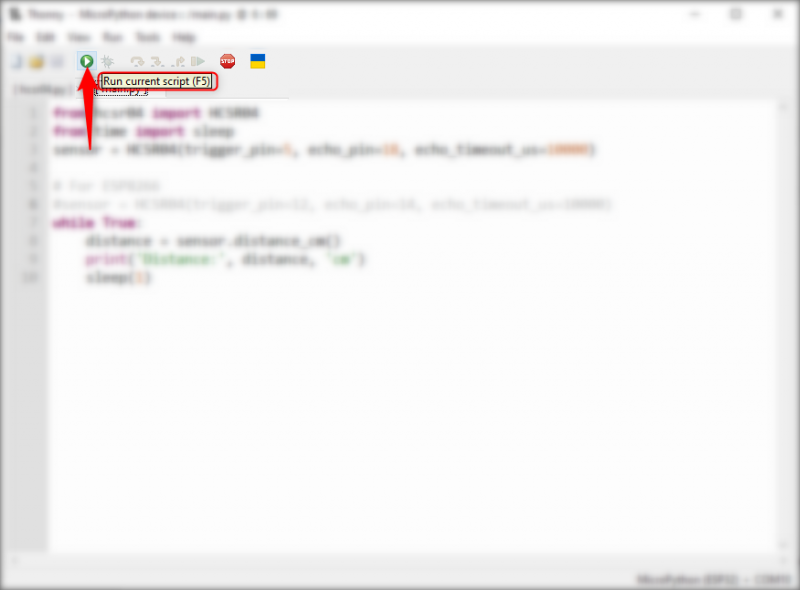
Након што сам написао и сачувао код унутар МицроПитхон уређаја, сада покрећем ултразвучни сензор маин.пи код датотеке. Кликните на дугме за репродукцију или притисните Ф5 .
Излаз ултразвучног сензора када је објекат близу
Сада поставите објекат близу ултразвучног сензора и проверите измерену удаљеност на прозору серијског монитора Ардуино ИДЕ.
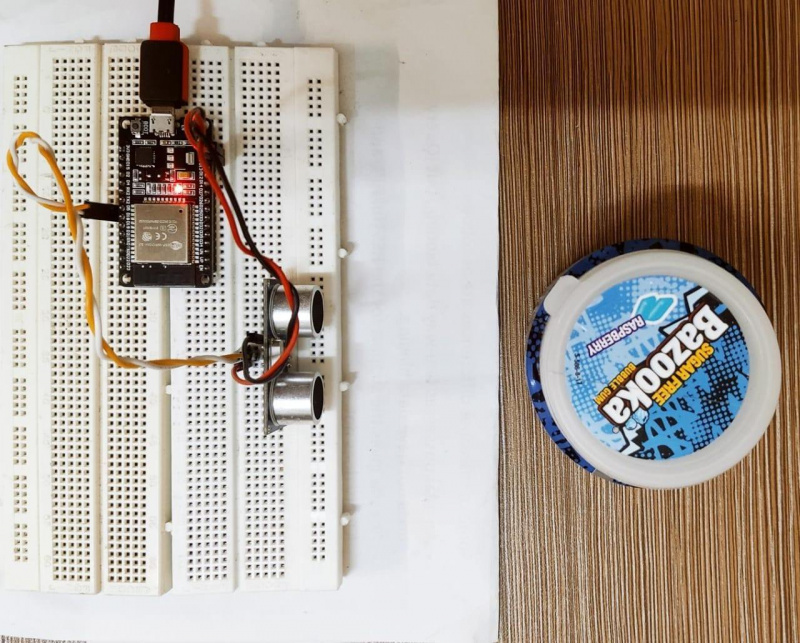
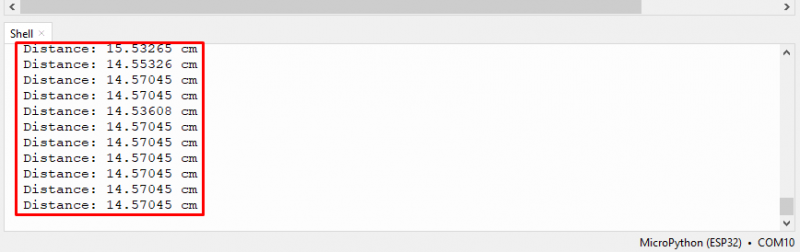
Удаљеност објекта је приказана у терминалу љуске. Сада је објекат постављен на 5 цм од ултразвучног сензора.

Излаз ултразвучног сензора када је објекат далеко
Сада да бисмо проверили наш резултат, поставићемо објекте далеко од сензора и проверити рад ултразвучног сензора. Поставите објекте као што је приказано на слици испод:
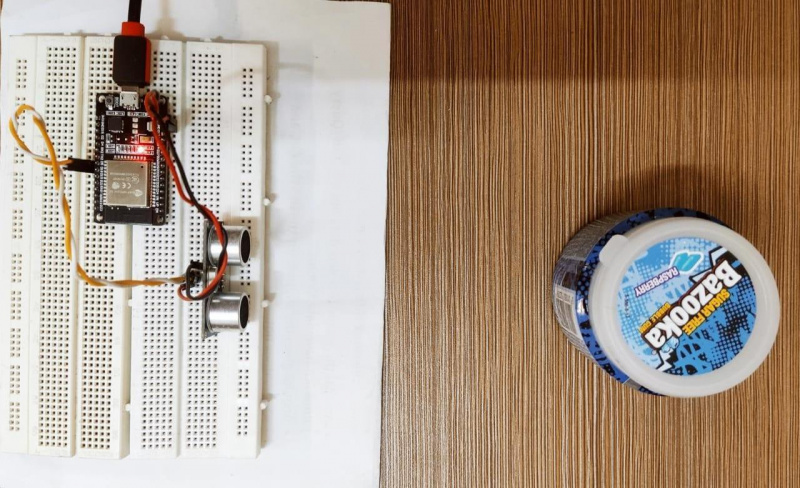
Излазни прозор ће нам дати ново растојање и како видимо да је објекат удаљен од сензора, тако да је измерено растојање цца. 15 цм од ултразвучног сензора.
Закључак
Мерење удаљености има одличну примену када је у питању роботика и други пројекти, постоје различити начини за мерење удаљености. ХЦ-СР04 са ЕСП32 може мерити растојање различитих објеката. Овде ће овај запис покрити све кораке који су потребни за интеграцију и почетак мерења удаљености помоћу ЕСП32.