ЕСП32 је микроконтролерска плоча заснована на ИоТ-у која се може користити за повезивање, контролу и читање различитих сензора. ПИР или сензор покрета је један од уређаја са којима можемо да повежемо ЕСП32 да бисмо открили кретање објекта у домету сензора покрета помоћу ЕСП32.
Пре него што почнемо да повезујемо ЕСП32 са ПИР сензором, морамо знати како функционишу прекиди и како их читати и руковати у ЕСП32. Затим морамо разумети основни концепт функције делаи() и миллис() у ЕСП32 програмирању.
Хајде да детаљно разговарамо о раду ПИР-а са ЕСП32.
Ево садржаја за овај чланак:
1: Шта су прекиди
Већина догађаја који се дешавају у ЕСП32 програмирању одвијају се секвенцијално, што значи извршавање кода ред по ред. За руковање и контролу догађаја који не морају да се покрећу током секвенцијалног извршавања кода ан Прекида се користе.
На пример, ако желимо да извршимо одређени задатак када дође до неког посебног догађаја, или се сигнал окидача да дигиталним пиновима микроконтролера, користимо прекид.
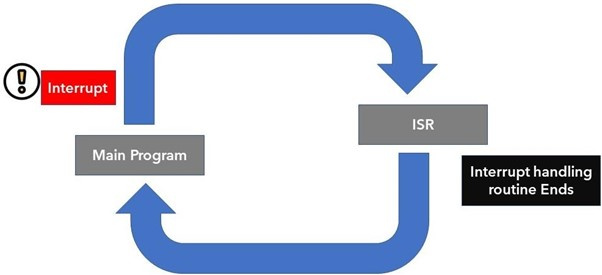
Са прекидом, не морамо континуирано да проверавамо дигитално стање ЕСП32 улазног пина. Када дође до прекида, процесор зауставља главни програм и позива се нова функција која је позната као ИСР ( Прекините сервисну рутину ). Ово ИСР функција управља прекидом изазваним након тога враћа се у главни програм и почиње да га извршава. Један од примера ИСР је ПИР сензор покрета која генерише прекид када се детектује кретање .
1.1: Прекида пинове у ЕСП32
Екстерни или хардверски прекид може бити узрокован било којим хардверским модулом као што је сензор на додир или дугме. Прекиди додира се дешавају када је додир детектован на пиновима ЕСП32 или ГПИО прекид се такође може користити када се притисне тастер или дугме.
У овом чланку ћемо покренути прекид када се детектује кретање помоћу ПИР сензора са ЕСП32.
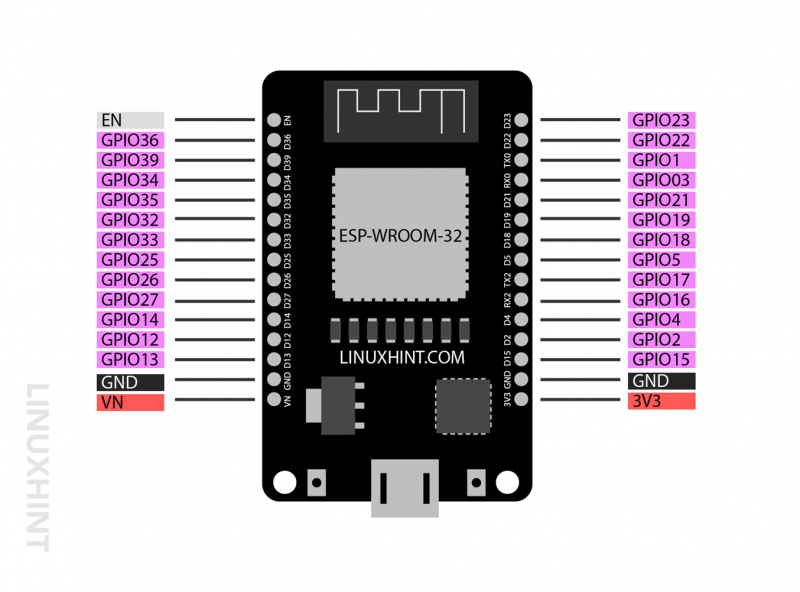
Скоро сви ГПИО пинови осим 6 СПИ интегрисаних пинова који обично долазе у 36 -пин верзија ЕСП32 плоче не може се користити у сврху прекида позива. Дакле, да бисте примили екстерни прекид, следеће су игле означене љубичастом бојом које можете користити у ЕСП32:
Ова слика је 30-пински ЕСП32.
1.2: Позивање прекида у ЕСП32
За коришћење прекида у ЕСП32 можемо позвати аттацхИнтеррупт() функција.
Ова функција прихвата следећа три аргумента:
-
- ГПИО пин
- Функција коју треба извршити
- Режим
1: ГПИО пин је први аргумент позван унутар аттацхИнтеррупт() функција. На пример, да бисмо користили дигитални пин 12 као извор прекида можемо га назвати употребом дигиталПинТоИнтеррупт(12) функција.
2: Функција који се извршава је програм који се извршава сваки пут када дође до прекида или га покрене екстерни или унутрашњи извор. То може бити или трептање ЛЕД диоде или укључивање пожарног аларма.
3: Режим је трећи и последњи аргумент који је потребан функцији прекида. Описује када треба покренути прекид. Следећи режими се могу користити:
-
- ниско: Активирајте прекид сваки пут када је дефинисани ГПИО пин низак.
- висока: Активирајте прекид сваки пут када је дефинисани ГПИО пин висок.
- Промена: Окидач прекида сваки пут када ГПИО пин промени своју вредност са високе на ниску или обрнуто.
- пада: То је начин да се покрене прекид када одређени пин почне да пада из високог у ниско стање.
- У порасту: То је начин да се покрене прекид када одређени пин почне да расте из ниског стања у високо.
Данас ћемо користити У порасту режим као трећи аргумент за функцију прекида кад год ПИР сензор детектује прекидну ЛЕД или сензор ће се упалити јер прелази из ниског стања у високо.
2: Тајмери у ЕСП32 програмирању
Тајмери у програмирању микроконтролера играју значајну улогу за извршавање инструкција за одређени период тајмера или у одређеном тренутку.
Две главне функције које се обично користе за покретање излаза су кашњење() и мили () . Разлика између њих у томе што функција делаи() зауставља остатак програма када почне да се извршава док миллис() ради дефинисани временски период, а затим се програм враћа на главне функције.
Овде ћемо користити ЛЕД са ПИР сензором и не желимо да га светлимо непрекидно након окидања прекида. Користићемо функцију миллис() која нам омогућава да је светлимо неко дефинисано време, а затим се поново враћамо на оригинални програм када та временска ознака прође.
2.1: функција делаи().
функција делаи() је прилично једноставна и узима само један аргумент који је Госпођа дугог типа података без потписа. Овај аргумент представља време у милисекундама које желимо да паузирамо програм док не пређе на следећи ред.
На пример, следећа функција ће зауставити програм за 1 сек .
кашњење ( 1000 )
делаи() је врста функције блокирања за програмирање микроконтролера. делаи() блокира извршење остатка кода све док се времена ове функције не заврше. Ако желимо да извршимо више инструкција, требало би да избегавамо коришћење функција одлагања уместо тога можемо да користимо мили или екстерне РТЦ модуле тајмера.
2.2: функција миллис().
функција миллис() враћа број милисекунди прошлих од када је ЕСП32 плоча почела да покреће тренутни програм. Писањем неколико редова кода можемо лако израчунати тренутно време у било ком случају док покрећемо ЕСП32 код.
миллис се широко користи тамо где треба да покренемо више задатака без блокирања остатка кода. Ево синтаксе миллис функције која се користи за израчунавање колико је времена прошло да бисмо могли да извршимо одређену инструкцију.
ако ( цуррентМиллис - претходниМиллис > = интервал ) {претходниМиллис = ЦуррентМиллис;
}
Овај код одузима претходни миллис() од тренутног миллис() ако је одузето време једнако дефинисању интервала у коме ће се одређена инструкција извршити. Рецимо да желимо да треперимо ЛЕД диодом 10 секунди. Након сваких 5 минута можемо подесити временски интервал једнак 5 минута (300000мс). Код ће проверити интервал сваки пут када се код покрене, када га достигне, ЛЕД диода ће трептати 10 секунди.
Белешка: Овде ћемо користити миллис() функцију за повезивање ЕСП32 са ПИР сензором. Главни разлог за коришћење милли а не кашњења је тај што функција миллис() не блокира код као што је то учинила функција делаи(). Дакле, када ПИР детектује кретање, биће генерисан прекид. Коришћење функције интеррупт миллис() ће покренути ЛЕД на дефинисано време након тога ако се кретање заустави, функција миллис() ће се ресетовати и чекати следећи прекид.
У случају да смо користили функцију делаи() она ће у потпуности блокирати код и било који прекид неће бити прочитан од стране ЕСП32, што резултира неуспехом пројекта.
3: Повезивање ПИР сензора са ЕСП32
Овде ћемо користити функцију миллис() у Ардуино ИДЕ коду јер желимо да активирамо ЛЕД сваки пут када ПИР сензор открије неки покрет. Ова ЛЕД лампица ће светлети одређено време након тога ће се вратити у нормално стање.
Ево листе компоненти које ће нам бити потребне:
-
- ЕСП32 развојна плоча
- ПИР сензор покрета (ХЦ-СР501)
- ЛЕД
- 330 Охм отпорник
- Прикључне жице
- Бреадбоард
Шематски за ПИР сензор са ЕСП32:
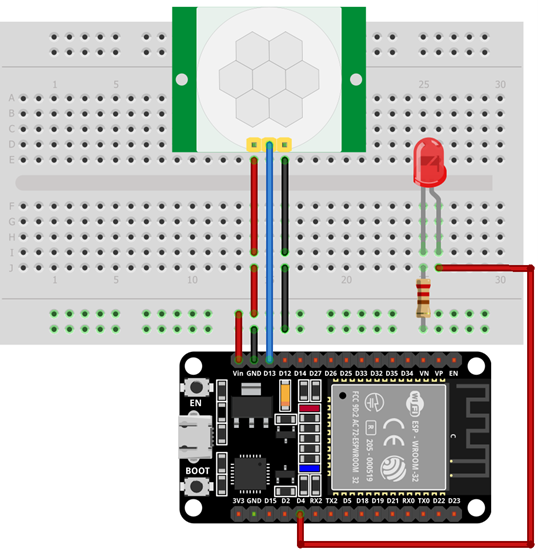
Пин везе ЕСП32 са ПИР сензором су:
| ЕСП32 | ПИР сензор |
| доћи | Вцц |
| ГПИО13 | ОУТ |
| ГНД | ГНД |
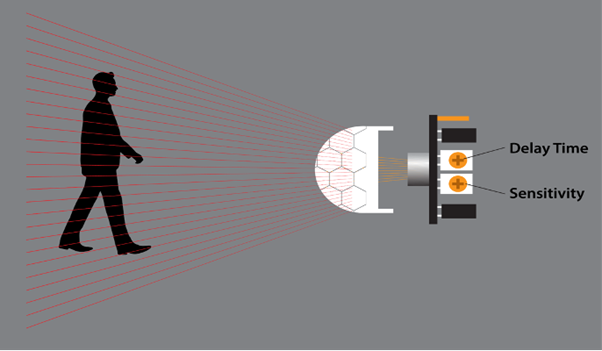
3.1: ПИР сензор покрета (ХЦ-СР501)
ПИР је акроним за пасивни инфрацрвени сензор . Користи пар пироелектричних сензора који детектују топлоту око своје околине. Оба ова пироелектрична сензора леже један за другим и када објекат дође у њихов домет, промена топлотне енергије или разлика сигнала између оба ова сензора доводи до тога да излаз ПИР сензора буде НИЗАК. Једном када ПИР излазни пин падне на ЛОВ, можемо поставити одређену инструкцију за извршење.
Следе карактеристике ПИР сензора:
-
- Осетљивост се може подесити у зависности од локације пројекта (као што је детекција покрета миша или листа).
- ПИР сензор се може подесити колико дуго детектује објекат.
- Широко се користи у кућним сигурносним алармима и другим апликацијама за детекцију покрета заснованих на термичкој температури.
3.2: Пиноут ХЦ-СР501
ПИР ХЦ-СР501 долази са три игле. Два од њих су пинови за напајање за Вцц и ГНД, а један је излазни пин за сигнал окидача.
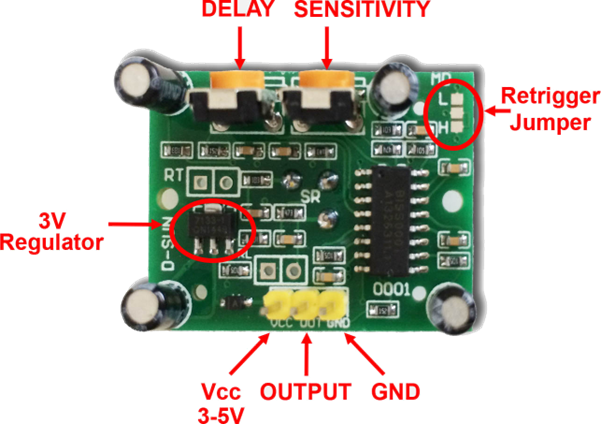
Следи опис пинова ПИР сензора:
| Пин | Име | Опис |
| 1 | Вцц | Улазни пин за сензор Повежите се на ЕСП32 Вин Пин |
| два | ОУТ | Излаз сензора |
| 3 | ГНД | Сенсор ГНД |
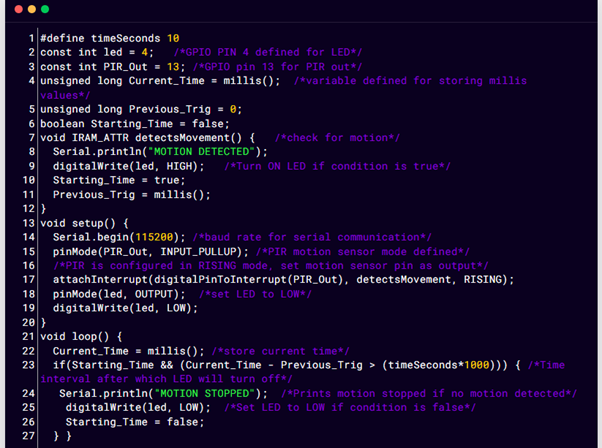
3.3: Код
Сада да програмирате ЕСП32, напишите дати код у Ардуино ИДЕ едитор и отпремите га у ЕСП32.
#дефине тимеСецондс 10цонст инт лед = 4 ; /* ГПИО ПИН 4 дефинисано за ЛЕД */
цонст инт ПИР_Оут = 13 ; /* ГПИО пин 13 за ПИР оут */
непотписано дуго Цуррент_Тиме = миллис ( ) ; /* дефинисана променљива за чување милиметарских вредности */
унсигнед лонг Превиоус_Триг = 0 ;
боолеан Стартинг_Тиме = лажно ;
воид ИРАМ_АТТР детектује кретање ( ) { /* проверавати за кретање */
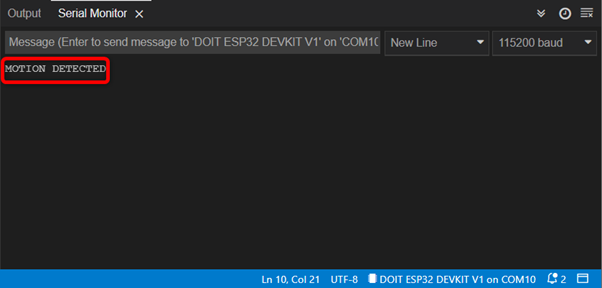
Сериал.принтлн ( „ОТКРИВЕН ПОКРЕТ“ ) ;
дигиталВрите ( водио, ВИСОКО ) ; /* Укључите ЛЕД ако стање је истинито */
Почетно_Време = истинито ;
Превиоус_Триг = миллис ( ) ;
}
празнина подешавања ( ) {
Сериал.бегин ( 115200 ) ; /* број бауда за серијска комуникација */
пинМоде ( ПИР_Оут, ИНПУТ_ПУЛЛУП ) ; /* Дефинисан режим ПИР сензора покрета */
/* ПИР је конфигурисан ин РИСИНГ режим, комплет пин сензора покрета као излаз */
аттацхИнтеррупт ( дигиталПинТоИнтеррупт ( ПИР_Оут ) , дететсМовемент, РИСИНГ ) ;
пинМоде ( лед, ОУТПУТ ) ; /* комплет ЛЕД на ЛОВ */
дигиталВрите ( лед, ЛОВ ) ;
}
празнина петља ( ) {
Цуррент_Тиме = милли ( ) ; /* чувати струју време */
ако ( Почетно врме && ( Цуррент_Тиме - Превиоус_Тригн > ( тимеСецондс * 1000 ) ) ) { /* Временски интервал после која ЛЕД ће се искључити */
Сериал.принтлн ( 'ПОКРЕТ ЗАУСТАВЉЕН' ) ; /* Кретање штампе је заустављено ако није детектован покрет */
дигиталВрите ( лед, ЛОВ ) ; /* Подесите ЛЕД на ЛОВ ако стање је лажно */
Почетно_Време = лажно ;
}
}
Код је започео дефинисањем ГПИО пинова за ЛЕД и ПИР излаз. Затим смо креирали три различите варијабле које ће помоћи да се укључи ЛЕД када се детектује покрет.
Ове три варијабле су Цуррент_Тиме, Превиоус_Тригн, и Почетно врме. Ове варијабле ће ускладиштити тренутно време, време у којем је покрет детектован и тајмер након што је покрет откривен.
У делу подешавања прво смо дефинисали серијску брзину преноса за комуникацију. Следеће коришћење пинМоде() подесите ПИР сензор покрета на ИНПУТ ПУЛЛУП. Да подесите ПИР прекид аттацхИнтеррупт() је описано. ГПИО 13 је описан да детектује кретање у режиму РИСИНГ.
Следеће у делу кода лооп(), користећи функцију миллис(), укључили смо и ИСКЉУЧИЛИ ЛЕД када је окидач постигнут.
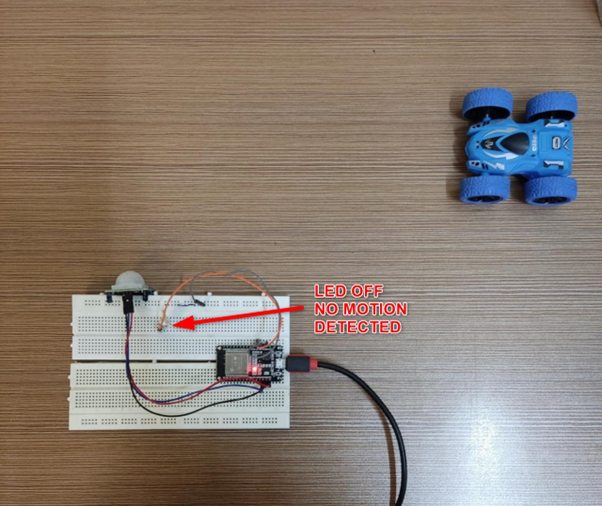
3.4: Излаз
У излазном делу можемо видети да је објекат ван домета ПИР сензора, тако да је ЛЕД је окренут ВАН .
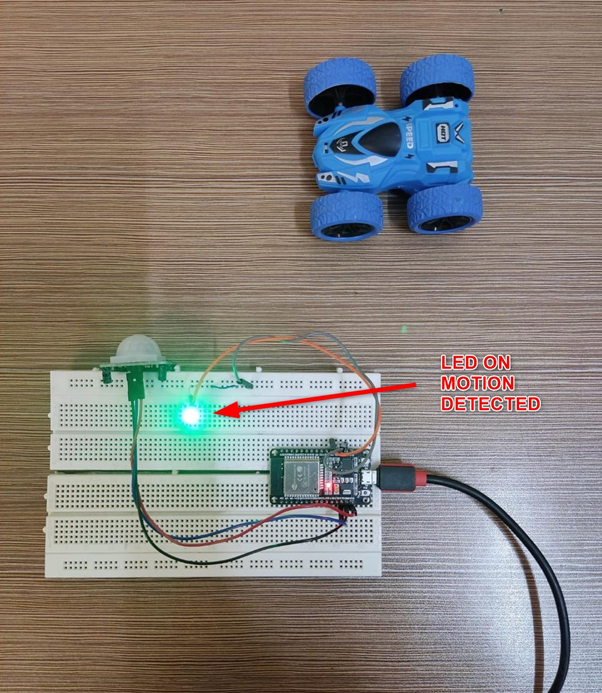
Сада ће се покренути покрет који детектује ЛЕД ПИР сензор НА за 10 сец након тога, ако се не детектује кретање, остаће ВАН док се не прими следећи окидач.
Следећи излаз приказује серијски монитор у Ардуино ИДЕ.
Закључак
ПИР сензор са ЕСП32 може помоћи да се открије кретање објеката који пролазе кроз његов домет. Користећи функцију прекида у ЕСП32 програмирању можемо покренути одговор на неком специфичном ГПИО пину. Када се открије промена, функција прекида ће се покренути и ЛЕД ће се укључити.